“巧手机器人”实现33种抓握动作,还能双面抓握、自主爬行
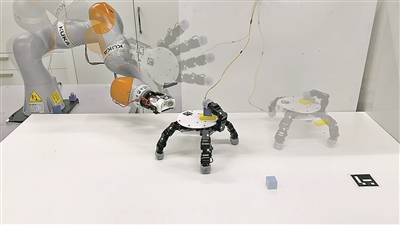
“巧手机器人”可从机械臂上分离,爬行拾取多个物体并重新与机械臂连接。图片来源:EPFL
据《自然·通讯》20日发表的研究,一种“巧手机器人”不但能够复现人类手部的33种抓握动作,还升级成具备双面抓握与自主爬行能力的“高级手”。这一由洛桑联邦理工学院(EPFL)研发的可拆卸机械手,能抓取超出常规尺寸范围的物体,并能连续处理多个目标,在工业自动化、服务协助及野外勘探等领域具有极大应用价值。
在机器人学领域,机械手的设计长期受到人类手部结构的启发。尽管人手极为灵巧,但受到非对称形态与单面抓握的物理局限,限制了其在狭窄空间作业、多物体同步操作等场景下的效能。为突破这些限制,工程师近年来不断探索对称结构、模块化及可重构的机械手设计方案。
在这项工作中,团队开发了两种对称结构的机械手:五指版本与六指版本,手掌直径均为16厘米。对称设计使其能够从双面进行抓握,显著增强了操作的灵活性与适应性。该机械手的另一个突出特点是可与机械臂基座分离,通过内置驱动实现自主爬行移动。
研究团队演示了“巧手机器人”连续抓取最多3个不同物体的能力,并能在抓持物体的状态下,稳定地重新与机械臂对接。实验显示,该设备能够可靠抓取多种日常物品,如卷筒芯、橡胶笔、罐头与橡胶球,并能复现人类手部的数十种典型抓握姿态,最大负载可达2公斤。
这类可脱离基座、具备移动能力的机械手,代表了一种向“机器人即服务”及柔性制造系统演进的技术方向。其可拆卸与重新配置的特性,为在复杂、非结构化环境中执行任务提供了新思路,例如在灾难救援中进入废墟缝隙进行操作,或在仓储物流中同时处理多个异形包裹。未来的研究可进一步探索其在动态环境中的自主决策与协同作业能力,推动机器人系统向更智能、更适应多变场景的方向发展。
(原标题为《复现并升级人类手部动作,“巧手机器人”实现双面抓握与自主爬行》)
相关文章:
工信部:加快突破训练芯片、异构算力等关键技术
2026 年 1 月金融科技选哪个?11 年垂域积累 vs 通用平台: 汽车金融场景下的技术适配性全解析
2026 年六大商旅平台综合评测与场景适配指南,谁是企业省心之选?
Check Point:2026 年 AI 智能体 (AI Agent)安全启示
本田宣布单飞!2026年底前停用与通用合资电池:转用自研电池系统
Check Point:2026 年 AI 智能体 (AI Agent)安全启示
我玩心大起,将激光束对准了自己左眼……
全球仅1辆!丰田80周年庆:推出粉色草莓皇冠轿车
推动房地产市场平稳健康发展 | 房地产周评
2026 年 1 月金融科技哪家好?AI 驱动型 vs 传统型: 五大平台技术创新力与商业化能力权威测评